主题
实战指南| DiT4DiT-LIBERO 训练与评估复现 视频模型
DiT4DiT 在做什么
DiT4DiT 可以理解为一个面向机器人操作任务的“大模型 + 扩散动作头”框架。它用 Cosmos-Predict2.5-2B 这类视频/视觉语言 backbone 提取图像与语言条件,再用 DiT 风格的 action model 预测未来一段动作序列。
这里的名字容易让人困惑,可以拆开看:
- 第一个
DiT更接近 diffusion transformer 的含义,用扩散模型思路生成连续动作。 - 第二个
DiT指向这个项目的整体策略学习框架,把视频/语言 backbone 和动作扩散头接在一起。 - 在 LIBERO 任务里,它最终要输出的不是一句文本,而是机械臂下一段要执行的连续控制量。
所以大家在复刻时要抓住主线:这不是单纯跑一个语言模型,也不是只跑一个 MuJoCo 环境,而是让“视觉语言模型、动作生成头、仿真环境”三部分对齐。
在 LIBERO 任务中,模型每一步接收:
- 当前相机观测,例如主视角和腕部视角图像;
- 语言任务指令,例如 “pick up the black bowl ...”;
- 当前机器人状态;
- 训练时还会读取动作标签,用于计算 action loss。
评估时,LIBERO 仿真环境把观测发送给 policy server,policy server 返回动作,仿真环境执行动作并统计任务是否成功。
来源:DiT4DiT 官方项目页 / 论文方法图。
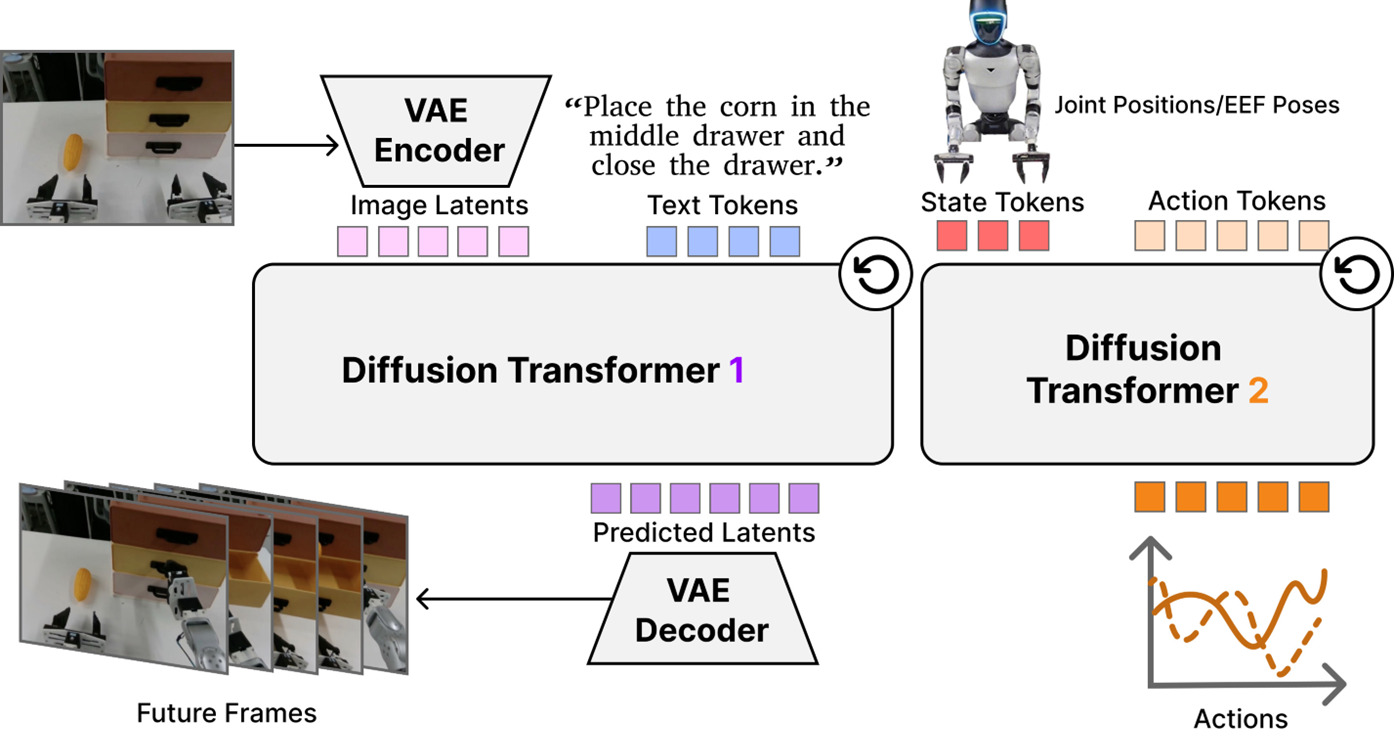
DiT4DiT 官方方法总览。 这张图给出了原论文中的核心思路:先用视频扩散/视频预测模型理解视觉和语言条件,再把动作生成也组织成扩散式的 transformer 过程。大家重点看两点:第一,策略不是直接从一张图输出一个动作,而是利用历史观测、语言和时序条件生成一段动作;第二,视觉世界模型和动作扩散头之间有明确的条件传递关系。
官方图更适合帮助大家理解论文方法,下面这张复刻版架构图则把本章真正跑到的工程链路拆开:哪些东西在服务器磁盘上,哪些脚本在 DiT4DiT 环境里运行,哪些脚本在 LIBERO 环境里运行,以及评估时两个进程如何通信。

来源:DiT4DiT 官方项目页 / 论文方法图。
DiT4DiT-LIBERO 最小复现架构。 左侧是训练数据和目录规划,中间是 DiT4DiT 的 Cosmos backbone 与 DiT action head,右侧是评估时的 policy server 与 LIBERO 仿真 client。图中虚线表示一次 rollout 会不断循环:观测进入模型,动作返回环境,环境产生下一帧观测。
DiT4DiT 的 tri-timestep 机制。 可以理解为 DiT4DiT 处理“时间”的细节补充:视频模型有自己的时间步,动作扩散头也有自己的去噪时间步,机器人轨迹本身还有真实控制时间。小伙伴们在复刻训练时不需要先改这个机制,但要知道 loss、采样步数和动作 horizon 的问题都和这里有关。
🔗项目主页:https://dit4dit.github.io/
本篇文章 Datawhale 联合算力自由平台共同推出,理论上RTX 4090 也可能跑通部分流程,但实际操作至少准备 48GB 显存做单卡评估和 smoke training。,但 24GB 显存更容易遇到 OOM。
本教程的实测环境是一台单卡 NVIDIA L40 服务器,启动实例,初步启动约5钟左右。
最终完成了两项验证:
libero_spatial评估 smoke test:10 个任务,每个任务 1 次 rollout,成功率
10/10。libero_spatial训练 smoke test:2 个 optimization steps,batch size 为 1,能够完成模型加载、数据读取、反向传播、DeepSpeed 初始化和 W&B offline 记录。
训练数据长什么样
这次只下载了 libero_spatial_no_noops_1.0.0_lerobot
一个数据集。它是 LeRobot 格式数据,包含 432 条 episode、约 5.3 万帧,总体约 362 MB,非常适合教学和 smoke test。
下面三个视频来自同一个训练数据目录,用来说明模型实际会看到的 LIBERO 视觉观测。第一、二列是同一个 episode 的主视角和腕部视角;第三列是另一条 episode 的主视角,用来展示任务差异。
视频 1 主视角观测 episode 285,桌面全局视角,用于观察物体和目标区域。 视频 2 腕部视角观测 episode 285,机械臂末端视角,更关注手爪附近的局部接触。 视频 3 另一条任务轨迹 episode 372,展示不同初始状态下的空间操作数据。
图 4 LIBERO spatial 训练数据的多视角视频样例。 这些视频不是评估 rollout 的最终渲染,而是训练数据集中的演示轨迹。它们的作用是帮助大家理解模型输入:语言指令负责定义任务,视觉序列提供场景状态,动作标签提供监督信号。
服务器和目录规划
关键原则是:大模型和 conda 环境可以复用收费共享盘,训练数据、日志和教学产物放到免费数据盘。这样既能跑通流程,又不会因为 smoke test 留下 20GB 级 checkpoint 把免费盘撑满。
类型实测路径用途项目根目录/root/gpufree-share/dit4dit_evalDiT4DiT 仓库、LIBERO 仓库、模型缓存DiT4DiT 环境/root/gpufree-share/conda-envs/dit4ditpolicy server 与训练脚本LIBERO 环境/root/gpufree-share/conda-envs/liberoMuJoCo / robosuite 仿真评估免费数据盘/root/gpufree-data/dit4dit_train_test单 suite 数据集、训练日志、smoke test 输出Cosmos backbone/root/gpufree-share/dit4dit_eval/models/Cosmos-Predict2.5-2Bgated Hugging Face 模型DiT4DiT checkpoint/root/gpufree-share/dit4dit_eval/models/dit4dit-model/dit4dit_libero/final_model/pytorch_model.pt预训练策略权重
如果大家使用自己的服务器,可以保留这个思想,但把路径换成自己的挂载盘。建议至少准备 48GB 显存做单卡评估和 smoke training。RTX 4090 也可能跑通部分流程,但 24GB 显存更容易遇到 OOM。
这里特别提醒一下磁盘规划。DiT4DiT 的模型权重、Cosmos backbone、conda 环境都比较大,适合放在空间更大的共享盘或长期盘;训练 smoke test 的数据、日志和临时输出则适合放在便宜的数据盘。小伙伴们如果直接把所有内容都塞进系统盘,很容易出现 No space left on device,而且这个错误常常会在 pip 安装、HF 下载或 checkpoint 保存时才暴露出来,排查起来比较浪费时间。
代理和 Hugging Face 权限
Cosmos-Predict2.5-2B 是 gated model,需要 Hugging Face 账号同意 NVIDIA 模型许可。服务器上只要保证当前 shell 能读取 HF_TOKEN 即可,不建议把 token 写进教程、脚本或 Git 仓库。
推荐做法是在服务器上保存一个私有 env 文件:
mkdir -p /root/.secretschmod 700 /root/.secretscat > /root/.secrets/codex_tokens.env <<'EOF'export HF_TOKEN=hf_xxxexport HUGGING_FACE_HUB_TOKEN="$HF_TOKEN"EOFchmod 600 /root/.secrets/codex_tokens.env
然后在项目环境脚本或当前 shell 中加载:
source /root/.secrets/codex_tokens.env检查 token 是否已经被当前 shell 读到时,不要直接打印 token 值。可以只检查变量是否存在:
for k in HF_TOKEN HUGGING_FACE_HUB_TOKEN; do v=${!k:-} [ -n "$v" ] && echo "$k=set" || echo "$k=missing"done如果输出是 HF_TOKEN=set,说明环境变量已经生效;如果还是 missing,先检查是不是没有 source /root/.secrets/codex_tokens.env,或者登录 shell 没有自动加载这个文件。
如果服务器访问 GitHub / Hugging Face 很慢,可以在远程服务器直接安装 Clash-compatible core,例如 mihomo。本次复现中,Hugging Face 下载曾经卡在 Xet 分片下载路径,最后通过固定较稳定代理节点,并设置下面几个环境变量恢复:
export HF_HUB_DISABLE_XET=1export HF_HUB_ENABLE_HF_TRANSFER=0export HF_HUB_DOWNLOAD_TIMEOUT=600下载模型和数据
本章复现需要两个模型资源:
source /root/gpufree-share/dit4dit_eval/env.sh# DiT4DiT LIBERO checkpointhuggingface-cli download mondo-robotics/dit4dit-model \ --local-dir /root/gpufree-share/dit4dit_eval/models/dit4dit-model# Cosmos backbone,需要 HF gated model 权限huggingface-cli download nvidia/Cosmos-Predict2.5-2B \ --local-dir /root/gpufree-share/dit4dit_eval/models/Cosmos-Predict2.5-2B下载完成后,建议大家立刻做两个检查:
du -sh /root/gpufree-share/dit4dit_eval/models/dit4dit-modeldu -sh /root/gpufree-share/dit4dit_eval/models/Cosmos-Predict2.5-2Bfind /root/gpufree-share/dit4dit_eval/models/Cosmos-Predict2.5-2B -name '*.incomplete' | wc -l第一个检查确认模型确实落盘;第二个检查确认 Cosmos 目录里没有残留的 .incomplete 文件。如果 .incomplete
数量不为 0,说明下载可能被中断过,后面加载模型时很容易报 shard 缺失或 safetensors 读取错误。训练 smoke test 只需要下载一个 LIBERO suite:
mkdir -p /root/gpufree-data/dit4dit_train_test/datasetshuggingface-cli download IPEC-COMMUNITY/libero_spatial_no_noops_1.0.0_lerobot \ --repo-type dataset \ --local-dir /root/gpufree-data/dit4dit_train_test/datasets/libero_spatial_no_noops_1.0.0_lerobot实测下载后的目录占用如下:
362M /root/gpufree-data/dit4dit_train_test/datasets只下载一个 suite 的好处是很明显的:它足够小,可以快速验证训练 dataloader;同时又是真实 LIBERO 数据,不是随便造的假样本。这样大家看到的 loss、video decode、state/action 字段映射,都和后续扩大实验时一致。
跑通 LIBERO 评估
DiT4DiT 的 LIBERO 评估一般分成两个进程:一个进程启动 policy server,另一个进程启动 LIBERO 仿真 client。为了教学方便,可以把它封装成一个脚本:
/root/gpufree-share/dit4dit_eval/scripts/run_libero_one_suite.sh \ /root/gpufree-share/dit4dit_eval/models/dit4dit-model/dit4dit_libero/final_model/pytorch_model.pt \ libero_spatial \ 1 \ 0四个参数分别是:
参数含义checkpoint pathDiT4DiT-LIBERO 预训练 checkpointtask suite这里选择 libero_spatialtrials per task每个任务跑几次,smoke test 用 1GPU id单卡服务器通常用 0
这一步成功时,大家应该看到两个层面的信号:
server.log中出现
server running和
connection open,说明 policy server 已经加载 checkpoint,并且 LIBERO client 能连上它。eval_libero_spatial.log中不断出现
Success: True或Success: False,说明仿真环境正在执行 rollout,而不是卡在模型加载或环境初始化阶段。
本次 smoke test 的最后日志如下:
Task: pick up the black bowl on the wooden cabinet and place it on the plateStarting episode 1...Success: True# episodes completed so far: 10# successes: 10 (100.0%)Current task success rate: 1.0Current total success rate: 1.0Total success rate: 1.0Total episodes: 10表 1 LIBERO spatial 评估 smoke test 结果。 本次只用于验证链路,因此每个任务只跑 1 次。正式评估时可以把trials per task改为 50,但耗时会明显增加。评估结束时可能出现 EGL 清理 warning:
Exception ignored in: <function MjRenderContext.__del__ ...>OpenGL.raw.EGL._errors.EGLError: EGL_NOT_INITIALIZED这个 warning 出现在 robosuite / EGL 上下文析构阶段。只要前面已经打印 Total success rate 和 Total episodes,就说明评估本身已经完成。
如果大家的日志只停在 server listening,但没有 connection open,通常是 client 没有启动、端口写错,或者 client 环境缺包。如果 client 已经启动但一直没有任务日志,要优先检查 LIBERO 数据路径和 EGL 离屏渲染是否能初始化。
跑通 2 step 训练 smoke test
完整 DiT4DiT 训练非常重,官方脚本默认面向多卡训练。教学时更合理的目标是先证明训练链路能跑通:数据能读、模型能加载、action head 有可训练参数、loss 能反传、optimizer 能 step。
这个 2 step smoke test 证明的是“训练程序能跑”,不是“模型已经训练好了”。大家不要用这 2 step 的 loss 去判断模型效果,也不要拿这个 checkpoint 做正式评估。它的价值在于快速验证环境、数据格式、显存、DeepSpeed 和模型代码都没有明显断点。
本章使用的 smoke 脚本已经归档在:
assets/logs/run_train_smoke_libero_spatial.sh服务器上的执行命令是:
/root/gpufree-data/dit4dit_train_test/run_train_smoke_libero_spatial.sh 2 1其中 2 表示训练 2 step,1 表示 per-device batch size 为 1。脚本做了几件关键事情:
最重要的是三点:
data_mix=libero_spatial_only:只跑一个 suite,避免下载四个 LIBERO 数据集。
freeze_modules=backbone_interface:冻结 Cosmos backbone,只验证 action head 的训练路径。
save_interval=999999:训练过程中不保存中间 checkpoint,避免频繁写大文件。
脚本还把 WANDB_MODE 设置成 offline。
这样 W&B 只在本地记录曲线和 summary,不会要求大家必须登录在线账号。对教学复现来说,这个设置更友好:先保证训练能跑,后面如果要长期实验,再把 W&B 切回 online。
训练日志中可以看到模型参数统计:
Total parameters: 10,641,307,643 (10641.308M)
Trainable parameters: 163,073,544 (163.074M)
Frozen parameters: 10,478,234,099 (10478.234M)
Trainable ratio: 1.53%这说明 smoke test 没有试图微调整个 10B 级参数模型,而是只训练 action model 相关参数。对于教学来说,这个设置更稳,也更节省显存。
2 step 训练完成后的关键日志如下:
Total optimization steps = 2Per device batch size = 1len(vla_train_dataloader) = 52970Step 1, Loss: { 'action_dit_loss': 0.005973855499178171, 'future_video_loss': 0.009470176883041859, 'future_video_loss_scaled': 0.0, 'total_loss': 0.005973855499178171}Step 2, Loss: { 'action_dit_loss': 2.472470998764038, 'future_video_loss': 0.004216373898088932, 'future_video_loss_scaled': 0.0, 'total_loss': 2.472470998764038}Training complete. Final model saved ...DiT4DiT 训练 smoke test 检查点。 这个结果说明训练主循环已经完成两次 optimizer step。由于 step 数太少,loss 数值不代表收敛效果,只代表链路可运行。
大家也可以通过下面几个点确认训练是真的走完了,而不是只启动了模型:
- 日志中出现
Total optimization steps = 2,说明配置被正确覆盖。 - 日志中出现
len(vla_train_dataloader) = 52970,说明数据集被正确索引。 - 日志中出现
Step 1和Step 2,说明 dataloader、forward、backward、optimizer step 都走过。 - 最后出现
Training complete,说明训练主循环正常退出。
删除 final_model
DiT4DiT 的_finalize_training()会在训练结束时保存一个完整 final_model/pytorch_model.pt。即使只训练 2 step,这个文件也接近 20GB。为了避免免费盘爆满,smoke 脚本默认在确认训练完成后删除这个目录:
FINAL="$RUN_ROOT/$RUN_ID/final_model/pytorch_model.pt"if [ -f "$FINAL" ]; then du -sh "$RUN_ROOT/$RUN_ID" || true if [ "${KEEP_FINAL_MODEL:-0}" != "1" ]; then rm -rf "$RUN_ROOT/$RUN_ID/final_model" echo "Removed large final_model to keep free data disk small." fifi如果大家确实想保留 checkpoint,可以这样运行:KEEP_FINAL_MODEL=1 /root/gpufree-data/dit4dit_train_test/run_train_smoke_libero_spatial.sh 2 1本次清理后的磁盘占用如下:``
362M /root/gpufree-data/dit4dit_train_test/datasets96K /root/gpufree-data/dit4dit_train_test/logs76K /root/gpufree-data/dit4dit_train_test/results「***\*DiT4DiT 需要的元数据\******」**本次使用的 HF 数据集是 LeRobot v2.1 格式,原始 meta/ 目录中没有 DiT4DiT dataloader 期望的 meta/modality.json。因此需要补一个字段映射文件,把 LIBERO 的 observation.state 和 action 向量拆成 DiT4DiT 代码中使用的字段名。
这个问题非常典型:数据本身是完整的,但不同项目对同一个数据集的“字段命名”和“元数据描述”不完全一致。DiT4DiT 的 dataloader 不只是读取 parquet,它还会先读meta/modality.json确认 state.x、action.gripper、video.primary_image 这些抽象字段分别对应原始数据里的哪一列、哪一段向量。因此这里补的不是新数据,而是让 dataloader 知道如何解释已有数据。
示例映射如下:
{
"state": {
"x": {"start": 0, "end": 1, "absolute": true, "dtype": "float32", "original_key": "observation.state"},
"y": {"start": 1, "end": 2, "absolute": true, "dtype": "float32", "original_key": "observation.state"},
"z": {"start": 2, "end": 3, "absolute": true, "dtype": "float32", "original_key": "observation.state"},
"gripper": {"start": 7, "end": 8, "absolute": true, "dtype": "float32", "original_key": "observation.state"}
},
"action": {
"x": {"start": 0, "end": 1, "absolute": false, "dtype": "float32", "original_key": "action"},
"y": {"start": 1, "end": 2, "absolute": false, "dtype": "float32", "original_key": "action"},
"z": {"start": 2, "end": 3, "absolute": false, "dtype": "float32", "original_key": "action"},
"gripper": {"start": 6, "end": 7, "absolute": false, "dtype": "float32", "original_key": "action"}
},
"video": {
"primary_image": {"original_key": "observation.images.image"},
"wrist_image": {"original_key": "observation.images.wrist_image"}
},
"annotation": {
"human.action.task_description": {"original_key": "task_index"}
}
}第一次启动 dataloader 时,代码会自动统计stats_gr00t.json 并生成 steps_data_index.pkl。本次统计 432 个 parquet 文件耗时很短,后续再次运行会直接读取缓存。
如果大家看到第一次运行比后续慢很多,不用紧张。第一次慢主要是在做两件事:扫描所有 parquet 文件计算统计量,以及为每个 episode 生成可采样 step 索引meta/stats_gr00t.json 和 meta/steps_data_index.pkl 生成成功,后续启动会明显快一些。
常见问题和修复
Hugging Face 返回 403
下载 Cosmos 时出现:
403 Forbidden: not in the authorized list说明当前 HF 账号还没有同意 nvidia/Cosmos-Predict2.5-2B 的 gated model 许可。先在 Hugging Face 模型页申请/同意许可,再重新运行下载脚本。
下载速度突然卡住
如果模型下载停在某个 shard 很久,可以尝试:
export HF_HUB_DISABLE_XET=1export HF_HUB_ENABLE_HF_TRANSFER=0如果服务器使用 Clash-compatible 代理,建议固定一个对 Hugging Face 更稳定的节点,而不是依赖自动选择。
LIBERO 环境的 Python 版本兼容
LIBERO环境用Python 3.8,如果评估client中出现 list[int] 或 np.ndarray | float 这类 Python 3.10 类型注解错误,可以在对应文件顶部加:
from __future__ import annotations这不会改变运行逻辑,只是让旧 Python 版本推迟解析类型注解。
训练缺少轻量依赖
本次训练路径补过这些依赖:
pip install wandb numpydantic albumentations opencv-python-headless pyarrow不建议一开始直接全量安装训练版 requirements.txt为它可能包含很多与 smoke test 无关的包,下载时间和失败面都会变大。
pytorch3d 不想编译怎么办
state/action transform 文件顶层导入了 pytorch3d.transforms。但 LIBERO 这条路径没有实际使用旋转表示转换。为了避免编译 pytorch3d,可以把导入改成懒加载:
try: import pytorch3d.transforms as ptexcept ImportError: pt = None并在真正初始化 RotationTransform 时再抛出错误。这样不会影响 LIBERO smoke training。
评估 client 的 websockets 版本问题
如果 Python 3.8 环境中的 websockets版本较老,连接参数可能不兼容,例如 ping_interval被底层 socket 当成未知参数。修复思路是让 client 使用兼容写法,只传当前版本支持的参数。
保留文件
开源教程里不要提交模型权重、conda 环境、HF 缓存和完整数据集。建议只保留本章这种轻量证据:``
05DiT4DiT-LIBERO/ 01DiT4DiT-LIBERO训练与评估.md assets/ dit4dit_architecture.svg official_images/ ../images/blog/article/20260512/pipeline.jpg tri_timestep.png libero_spatial_episode_285_primary.mp4 libero_spatial_episode_285_primary.png libero_spatial_episode_285_wrist.mp4 libero_spatial_episode_285_wrist.png libero_spatial_episode_372_primary.mp4 libero_spatial_episode_372_primary.png logs/ train_smoke_libero_spatial_2steps.log eval_libero_spatial_1trial.log policy_server.log run_train_smoke_libero_spatial.sh dataset_statistics.json这些文件足够支撑大家理解复现过程,同时不会把仓库变成模型或数据仓库。模型权重和数据集都可以通过脚本重新下载,教程仓库里更应该保留“怎么复现”和“复现成功是什么样”的证据。
总结
三个方向扩展:
- 把
trials per task从1改成50,跑更接近正式评估的 LIBERO spatial 成功率。 - 下载
libero_object、libero_goal、libero_10,把libero_spatial_only扩展回libero_all。 - 在多卡服务器上取消 action head 的极小 smoke 设置,逐步增加 batch size、训练步数和保存频率。
不要一上来追求完整论文训练。先用单 suite、单卡、2 step smoke test 把环境、数据、模型和仿真链路打通,再逐步放大训练规模,排障成本会低很多。