主题
新一代高保真仿真器 GS-Playground 在算力自由平台复现指南
1. 环境创建
1.1 使用Gpufree平台官方网址:https://www.gpufree.cn/home
在“镜像仓库”中,搜索“ubuntu24.04”
- 一键开启的底层环境:Cuda 12.8 ubuntu24.04
- 带有远程桌面,稳定,流畅,可以在浏览器打开界面

- 打开打开终端,执行官方的安装指令安装uv
bash
# Skip this line if uv is already installed.
curl -LsSf https://astral.sh/uv/install.sh | sh官方没有提供科学上网,自己电脑上下载好后上传
操作步骤:
首先,在实例环境中安装rsync
bash
# SSH到远程机器上
apt update && apt install -y rsync其次将gs_playground克隆到本地并压缩成zip,执行上传指令
bash
# 上传文件到实例数据盘
rsync -avz -e "ssh -p <SSH端口>" <本地路径> root@<实例IP>:/root/gpufree-data/最后,在终端上执行指令
bash
# 安装耗时约10分钟
UV_CACHE_DIR=.uv-cache uv sync --reinstall-package motrixsim-core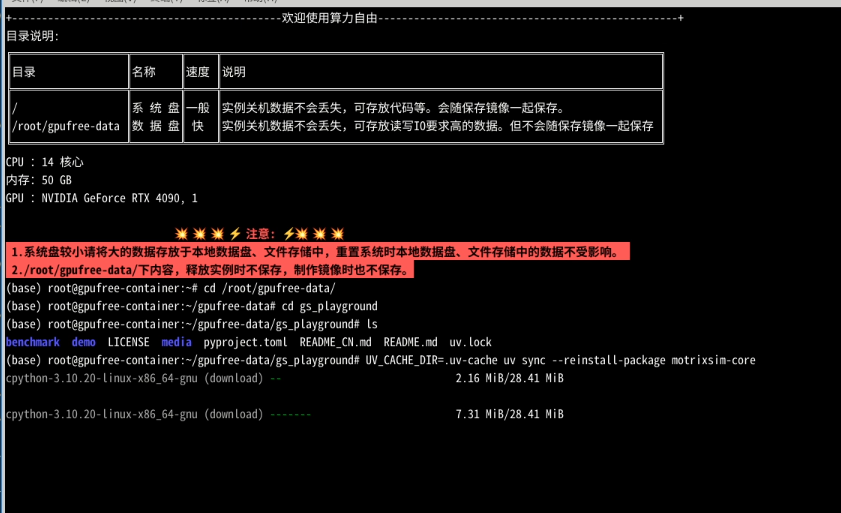
2 执行Demo
2.1 运行回放demo
bash
UV_CACHE_DIR=.uv-cache uv run python demo/live_demo/replay.py2.2 运行足式机器人运控Demo
bash
## Unitree Go2
UV_CACHE_DIR=.uv-cache uv run python demo/navigation/robot_locomotion.py --config configs/go2_scene1.json
## Unitree G1
UV_CACHE_DIR=.uv-cache uv run python demo/navigation/robot_locomotion.py --config configs/g1_scene1.json